История советской робототехники

А вот слово «робот», напротив, славянского происхождения. Его придумал чешский писатель Карел Чапек, который описал в своей социально-фантастической пьесе «R.U.R.» «механических людей» в 1920 году. Оно образовалось от слова «робота» – работа по-чешски. А в 1942 году писатель-фантаст Айзек Азимов впервые употребил термин «робототехника», а также вывел 3 закона для роботов. Так, робот должен выполнять приказы человека, не причинять ему вред и уметь защищать себя.
Современная робототехника возникла во второй половине ХХ-го века, когда значительно возросла потребность в автоматизации производственных процессов. Современное определение робота обозначает его как универсальный автомат для осуществления действий, имитирующих действия человека.
Существует несколько направлений развития робототехники. Военные роботы используются для помощи военнослужащим в военных операциях. К ним относятся роботы-сапёры и спасатели, роботы-разведчики – беспилотные летательные аппараты и другие. Космические роботы отлично справляются с работой за пределами Земли – это зонды, луноходы, марсоходы и другие. Бытовые роботы помогают человеку в повседневной жизни, например, робот-пылесос.
Промышленные роботы представляют собой систему манипуляторов, управляемых при помощи специальных программ. Эти роботы предназначены для выполнения операций, связанных с перемещениями предметов, и используются в научных лабораториях и на промышленных производствах, чаще всего для покраски и как сварщики. В настоящее время в производственных процессах роботов используют для работы в смертельно опасных и агрессивных средах, при выполнении тяжёлых примитивных операций и в технологических процессах с тяжёлыми условиями труда, где шум, вибрация или высокая температура вызывают профессиональные болезни рабочих и быструю усталость [11].
Прогресс в робототехнике движется прежде всего в сторону совершенствования систем управления. Первое поколение промышленных роботов имело программное управление, основанное на станках с числовым программным управлением (ЧПУ). В роботах второго поколения использовалось адаптивное управление. Это очувствленные роботы – то есть они снабжены сенсорными системами, среди которых главной является система технического зрения (СТЗ). Доля этих роботов в общем количестве в 1980-х годах составляла около 50%, несмотря на то, что они в несколько раз дороже роботов с программным управлением и значительно сложнее в обслуживании. Однако затраты окупаются большими функциональными возможностями подобных роботов. К третьему поколению роботов относятся роботы с интеллектуальным управлением, пока они ещё находятся в стадии разработки и исследований [16].
Хронология развития робототехники
История робототехники неразрывно связана с историей развития ЭВМ. Чёткого и однозначного определения, что такое "робот" не существует, поэтому сложно определиться с датой, когда же в СССР был создан первый робот.
Известно, что в 1936 году 16–летний советский школьник Вадим Мацкевич создал «робота», который умел поднимать правую руку. Для этого он потратил 2 года работы в токарных мастерских новочеркасского Политеха. Ранее, в 12 лет создал маленький радиоуправляемый броневик, стрелявший фейерверками.
На "робота" Мацкевича обратили внимание власти и в 1937 году он представлял его на Всемирной выставке 1937 года в Париже. "Робот" имел небольшую особенность: мотор был слабоват, и прямая рука поднималась лишь чуть выше плеча. Немцы тут же увидели в этом жесте приветствие «Зиг хайль!» и бегали в советский павильон фотографироваться с «политическим» роботом. Мальчику пришлось отвечать за своё детище перед сотрудниками НКВД, но, к счастью, ему удалось избежать наказания со стороны органов. Мацкевич получил диплом выставки, о чём написали все советские газеты.
Творение Мацкевича могло только поднимать руку, не выполняло никаких полезных действий и не обладало искусственным интеллектом, однако выглядело похожим на человека - так, как должен выглядеть классический робот в представлении широких масс - об этом говорит и то, что Мацкевич получил диплом на парижской выставке.
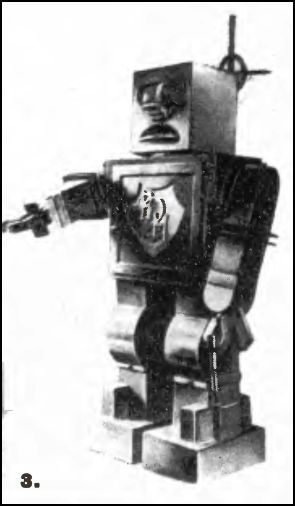
"Робот" Вадима Мацкевича, выставлявшийся на всемирной выставке в Париже
После школы Вадим Мацкевич окончил сначала Московский энергетический институт, потом Ленинградскую военно-воздушную академию. Во время Отечественной войны Мацкевич служил лётчиком-испытателем.
В 1950 году вспыхнула война между Северной и Южной Кореей. СССР вступились за северян, в то время как США приняли сторону южан. В начальные периоды войны американцы побеждали благодаря новым истребителям «Сэйбр». Они могли сбить цель, находясь от неё за два километра, тогда как остальные самолёты стреляли лишь в пределах двухсот метров. Но однажды удалось перехватить подбитый «Сэйбр», который тут же отправился в Москву для исследования. Мицкевич разобрался в «хитром» электронном прицеле американцев, и создал радиолокационную станцию «Сирена». Улавливая частоту сигналов истребителя за 10 км, «Сирена» предупреждала пилота о том, что он находится под прицелом. Когда первые испытания прошли успешно, Сталин приказал оборудовать РЛС все самолёты.
В 1948 году Сергей Лебедев закончил разработку первой отечественной ЭВМ [3], а в 1950 году в СССР вступила в действие первая вычислительная электронная цифровая машина МЭСМ, самая быстродействующая в Европе. Ещё через год вышел приказ о создании автоматических систем управления военной техникой, а в МВТУ им. Баумана создали кафедру специальной робототехники и мехатроники. В 1958 году создана первая в мире полупроводниковая АВМ (Аналоговая Вычислительная Машина) МН-10, которая имела большой успех на выставке в Нью-Йорке в 1959 году. В том же году советский кибернетик Виктор Глушков высказал идею «мозгоподобных» структур ЭВМ, которые объединят миллиарды процессорных элементов, так что произойдёт слияние памяти с обработкой данных [4].
В это время в США в 1954 году создал первого промышленного программируемого робота и ввёл термин Universal Automation. Впоследствии он немного сократил его и назвал свою компанию Unimation. В Массачусетском технологическом институте родилась идея создания очувствленного робота. Аспирант института Г. Эрнст разработал очувствленную руку-манипулятор под управлением компьютера. Она собирала кубики, разбросанные по столу, и складывала их в ящик. В том же институте в 1958 году создан один из первых языков программирования – LISP.
1960-е годы характеризуются бурным расцветом всей техники в целом. В 1960 году в США разработали первый робот «Versatran», предназначенный для промышленного применения. В 1961 году Гагарин осуществил первый полёт человека в космос, была запущена на траекторию полёта к Венере советская автоматическая межпланетная станция «Венера-1». В 1962 году фирма Unimation внедряет первые промышленные роботы-манипуляторы на заводах General Motors. Механические руки использовались при сборке автомобилей, перемещали 40-килограммовые детали.
В 1963 году впервые в мировой истории сотрудники кафедры робототехники МВТУ им. Баумана создали манипулятор для размещения на внешней поверхности аппаратов типа «Восток». Управление манипулятором происходило с помощью специальных устройств управления, которые имитировали перемещение в пространстве человеческой руки. Сложность состояла в том, чтобы исключить возможное влияние на работу манипулятора внешних обстоятельств.
В 1965 году на ЭВМ серии "Мир" применили аппаратную реализацию языков, что позволило проводить аналитические преобразования, в том числе дифференцирование и интегрирование формул.
В 1966 году советская автоматическая станция «Луна-9», совершив посадку на поверхности спутника Земли, начала первую в истории радиотрансляцию с поверхности Земли. Автоматическая станция «Венера-3» достигла поверхности Венеры и оставила там вымпел СССР. Так впервые автоматический аппарат перелетел с Земли на другую планету.
В то же время в СССР разработали революционную модель ЭВМ второго поколения – БЭСМ-6, в которой впервые появился прообраз современной кэш-памяти. Академик В. Глушков завершил разработку проекта большой ЭВМ «Украина», идеи устройства которой позднее были использованы в больших американских ЭВМ 1970-х годов [5].
В 1968 году при Ленинградском политехническом институте было создано Особое конструкторское бюро технической кибернетики, а главным конструктором назначен Е. И. Юревич. В первые годы ОКБ ТК занималось разработкой манипуляторов для подводных аппаратов, а также систем управления мягкой посадкой космических кораблей «Союз» [6]. Также совместно с Институтом океанологии Академии наук СССР в Ленинградском политехническом институте разработали подводный робот «Манта» с очувствленным устройством захвата, телеуправляемый от ЭВМ [16].
В Японии в это время начинается выпуск промышленных роботов по лицензии компании Unimation.
В 1969 году в рамках первого этапа работ по созданию системы предупреждения о ракетном нападении была создана компьютерная сеть с каналами передачи данных [5].
В СССР приступили к разработке промышленного робота «Универсал-5» [19].
Универсал-5
В 1970-х годах ОКБ ТК были созданы системы управления мягкой посадкой «Квант» для межпланетной станции «Луна-16», системы автоматизированного управления манипуляторами, разработаны приборы контроля бортовых систем для орбитальных космических аппаратов «Союз» и «Салют». Разработаны системы автоматизированного управления манипулятором для изделия Катран-2 и создано ультразвуковое очувствление схвата подводного манипулятора. Проведены испытания первого импульсного рентгеновского высотомера «Факел». В 1972 году Е. Юревича назначили главным конструктором по созданию промышленных роботов в СССР, и уже в следующем году были введены в эксплуатацию первые в стране подвижные промышленные роботы МП-1 и «Спрут-1» [7].
Спрут-1
Вслед за «Луной-16» к спутнику Земли вскоре отправилась автоматическая межпланетная станция «Луна-17», на борту которой находился самоходный аппарат Луноход-1. 17 ноября 1970 года он совершил посадку в районе Моря дождей и приступил к выполнению программы исследований. Управление исследовательским аппаратом осуществлялось при помощи комплекса аппаратуры на базе ЭВМ «Минск-22».
В 1971 году в СССР робототехнику официально признали как новое научное направление. В МВТУ академик Евгений Попов возглавил кафедру специальной робототехники и мехатроники, а также создал целую научную школу. В американской компании Intel создан первый микропроцессор.
В Ленинградском политехническом институте создан экспериментальная модель интегрального робота, который был снабжён развитой системой очувствления, включающей техническое зрение и речевое управление [16].
Аппарат советской автоматической межпланетной станции «Марс-3» совершил посадку на поверхность Марса и начал передачу видеоданных на Землю. Он доставил на поверхность планеты микромарсоход М-71 с лыжно-шагающим принципом движения, но через 20 секунд связь со станцией оборвалась.
С 1972 года разработка роботов приняла плановый характер. Постановление Госкомитета СССР по науке и технике определило создание и применение роботов в машиностроении как задачу государственной важности и были сформулированы основные направления решения. В Институте Кибернетики под руководством Николая Михайловича Амосова создан автономный транспортный робот «Таир» с сетевой системой управления. «Таир» мог целенаправленно двигаться в естественной среде, при этом объезжая препятствия и поддерживая внутренние параметры в заданных пределах. Для передвижения робот использовал тактильные датчики, оптический дальномер, датчики состояния собственных подсистем и другие вспомогательные устройства. Для его управления была разработана нейроноподобная сеть, разделённая на шесть сфер: элементарных действий, распознавания и оценки ситуаций, решений, маневров верхнего и нижнего уровней [8].
транспортный робот "Таир"
В 1973 году в ОКБ ТК при Ленинградском политехническом институте созданы и введены в эксплуатацию первые в стране подвижные промышленные роботы МП-1 и «Спрут».
В 1974 году провели первый чемпионат мира по шахматам среди компьютеров. Титул первого компьютерного чемпиона завоевала советская программа «Каисса». Постановлением Совета Министров СССР ОКБ ТК назначено главной организацией в СССР по разработке промышленных роботов для машиностроения.
В 1975 году в СССР были запущены автоматические межпланетные станции «Венера-9» и «Венера-10». Совершив посадку на Венере, они передали информацию о поверхности планеты через орбитальные отсеки на Землю. Это стало первой удачной попыткой ретрансляции такого сложного сигнала автоматическими системами.
В соответствии с постановлением Госкомитета СССР по науке и технике созданы первые 30 серийных промышленных роботов для обслуживания прессов, станков, для точечной сварки, которые управлялись стационарными и подвижными пневмо-, гидро- и электроприводами [16].
В Ленинграде разработаны система магнитной навигации «Кедр», «Инвариант» и «Скат» для космических кораблей, самолётов и подводных лодок.
В это время в США в 1976 году Стив Джобс вместе с другом создают персональный компьютер Apple 1, с которого началась компьютерная революция.
В 1977 году В. Бурцев создал первый симметричный многопроцессорный вычислительный комплекс (МВК) «Эльбрус-1», и Советский Союз начал уверенно лидировать в строительстве суперкомпьютеров. Для межпланетных исследований был создан интегральный робот «Кентавр», который управлялся вычислительным комплексом М-6000. Его навигационная система состояла из гироскопа и системы счисления пути с одометром, а информация об окружающей среде поступала от лазерного сканирующего измерителя расстояний и тактильной системы, построенной на микровыключателях и упругих чувствительных элементах.
В 1979 году начат выпуск высокопроизводительных многопроцессорных УВК с перестраиваемой структурой ПС 2000, где производилось распараллеливание на уровне задач, ветвей, векторных и скалярных операций. Благодаря технологии распараллеливания задач разработки систем искусственного интеллекта вышли на новый этап [9].
В Институте Кибернетики под руководством Н. Амосова создан робот "Малыш", который также как и "Таир" управлялся обучающейся нейронной сетью. Он был сконструирован в виде шестиколёсной тележки, на которой размещались магнитный компас, оптический дальномер и контактные датчики. С МАЛЫШом был проведён целый ряд фундаментальных исследований и выявлены преимущества нейронносетевой системы управления перед традиционными алгоритмическими [8].
В пятилетку 1975-1980 было создано более ста промышленных роботов, организовано серийное производство 40 моделей. Также началась работа по стандартизации промышленных роботов в соответствии с программой Госстандарта СССР [16].
В 1980 году в СССР появился первый пневматический промышленный робот с позиционным управлением и техническим зрением МП-8. Он был разработан в ОКБ ТК Ленинградского политехнического института, в котором вскоре был создан Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики (ЦНИИ РТК). К концу 1980 года количество промышленных роботов в стране превысило 6000 штук, что составляло более 20% от мирового числа [16].
В 1981 в ЛПИ создали системы «Клён», «Маркер» и «Призыв» для спасения информации с терпящих бедствие летательных аппаратов и маркировки мест аварии [7].
Также в МВТУ им. Баумана открылся Научно-учебный центр «Робототехника», который объединил все московские вузы и институты Академии Наук, занимавшиеся робототехникой. В этом центре разработали модель самого массового промышленного робота МП-9С, серийное производство которого началось в 1982 году на АвтоВАЗе. В 1983 году на базе МВТУ им. Баумана по заказу КГБ для подразделений по борьбе с терроризмом создан мобильный робот, работающий со взрывоопасными предметами. Продолжила это направление разработка робототехнического комплекса МРК20 для работы с неразорвавшимися боеприпасами.
В США в 1982 году поступил в продажу персональный робот HERO-1. Роботы этой серии были плохо приспособлены к выполнению практических заданий, а скорее служил развлекательной цели. HERO-1 управлялся бортовым компьютером с процессором Motorola, а объём его оперативной памяти составлял всего 4 KbB. Он был снабжён датчиками движения, кроме того в комплект дополнительно входила рука-манипулятор [24].
В 1984 году начат серийный выпуск советской многопроцессорной супер ЭВМ – ЕС-2701 с макроконвейерной организацией вычислений. Подобная архитектура определила дальнейшие идеи организации многопроцессорных ЭВМ [10]. В этом же году в Японии в Токийском университете создан робот Wabot-2. Он умеет читать ноты с помощью системы технического зрения, а затем играет прочитанную мелодию на органе десятью пальцами.
В Институте Кибернетики по заказу Министерства обороны СССР создан автономный робот МАВР, способный целенаправленно передвигаться в условиях сложной пересечённой местности. Благодаря оригинальной конструкции он обладал высокой проходимостью и надёжной защитой схем управления. Данные об окружающей среде поступали на бортовой компьютер через оптические и тактильные датчики и после обработки он принимал решение о направлении движения и других операциях.
Появился новый способ борьбы с пожарами – был спроектирован пожарный робот для защиты памятников деревянного зодчества музея «Кижи».
Компания АвтоВАЗ приобрела лицензию фирмы KUKA и стала крупнейшим интегратором робототехники в Советском Союзе.
В 1985 году ЦНИИ РТК разрабатывает систему бортовых манипуляторов для МКС «Буран». Эта система предназначена для выполнения операций с многотонными грузами: выгрузка, стыковка с орбитальной станцией. В состав системы вошли два манипулятора длиной 15 метров, система управления с бортовой ЭВМ и подсистемы освещения, телевидения и телеметрии. К концу года количество промышленных роботов в Советском Союзе превысило 40 тысяч штук, что в несколько раз превзошло количество роботов в США и составило 40% всех роботов в мире [16].
В США разработан домашний робот RB5X, которого можно запрограммировать на речь, движение по комнате и несложные задания по доставке предметов.
После катастрофы на Чернобыльской АЭС в апреле 1986 года в МВТУ им. Баумана инженеры В. Шведов, В. Доротов, М. Чумаков, А. Калинин немедленно разработали мобильные роботы для проведения работ в зоне аварии – МРК и Мобот-ЧХВ. С их помощью провели полный цикл уборки и подготовили участок крыши третьего энергоблока для бетонирования.
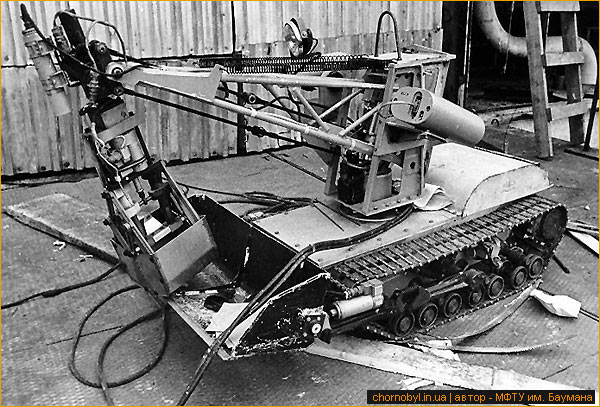
"Мобот-ЧХВ" (мобильный робот, чернобыльский, для химических войск)

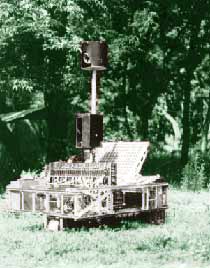
Робот СТР-1, выполнявший работы на кровле ЧАЭС
По данным Е.И Юревича, на ликвидации Чернобыльской аварии было задействовано около 15 типов модульных роботов, которые имели разное назначение. Легкие роботы - роботы-разведчики использовались для изучения радиационной обстановки в помещениях Саркофага, тяжелые роботы - технологические роботы предназначавшиеся для уборки (дезактивации) территории.
Далеко не все роботы, которые пытались привлечь к ликвидации аварии были способны выполнить поставленные задачи и провести необходимые работы. Большинство роботов оказалось непригодными для работы в условиях ЧАЭС. Например, радиоуправляемый бульдозер амфибия «Komatsu», который был способен работать даже на морском дне – не выдержал радиационных нагрузок и быстро вышел из строя. Непригодным для работы в таких жестких радиационных условиях оказались и два немецких робота MF-2 MF-3.
На ликвидации аварии был применен совмещенный тип использования разных типов роботов. Легкий робот-разведчик обслуживал работу выполняемую тяжелыми (технологическими) роботами. Обеспечивал динамическую визуализацию рабочей площадки для оператора тяжелого робота, а также давал возможность контроля за выполнением работ. Но в большинстве легкие роботы использовались по своему прямому назначению – разведка и проведение видео, фото и гамма-съемки в помещениях 4-го блока Чернобыльской АЭС[28].
Роботы и робототехнические комплексы на ЧАЭС
В 1988 году осуществлён запуск МКС «Энергия-Буран», которая стала самым масштабным проектом 1980-х годов. Автором проекта стал главный конструктор В. Глушко. Весь сложнейший комплекс систем посадки, навигации, контроля траектории движения управлялся интеллектуальной системой «Вымпел», которая являлась самой передовой технологией для того времени [10].
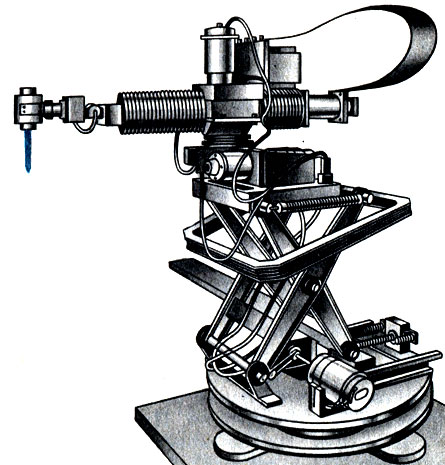
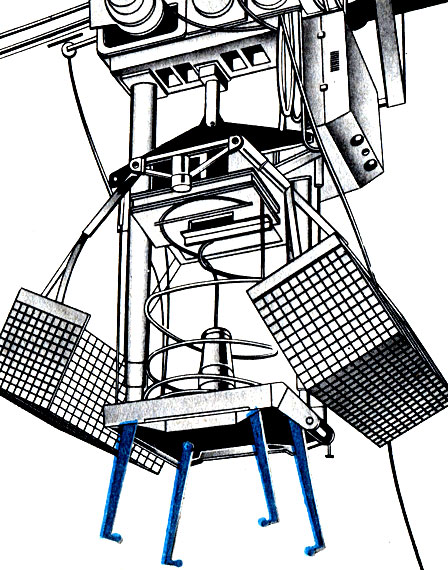
Промышленные роботы
Промышленная робототехника является, пожалуй, самым перспективным направлением развития. Только за 10 лет с 1969 по 1979 годы количество комплексно механизированных и автоматизированных цехов и производств выросло с 22,4 до 83,5 тысяч, а механизированных предприятий – с 1,9 до 6,1 тысяч [12]. Всего же в Советском Союзе было выпущено более 100 тысяч единиц промышленных роботов, которые заменили более миллиона рабочих [15].
Советские инженеры планировали внедрить использование роботов практически во все сферы промышленности: машиностроение, сельское хозяйство, строительство, металлургия, горнодобывающая, лёгкая и пищевая промышленность и другие. Так, в одном из московских ателье появился робот-закройщик. Он был запрограммирован на выполнение различных операций – от измерения всех необходимых размеров фигуры заказчика до раскроя ткани. Учитывая модель костюма, варианты использования ткани и другие параметры, робот выдаёт на выкройку на листе бумаги [20].
В США разработка промышленных роботов выделилась в отдельную отрасль в 1970-х годах. Появление микропроцессоров создало основу современных систем управления роботами. В 1973 году во всём мире использовались 3 тысячи промышленных роботов, из которых 30% принадлежали американской компании Unimation. В среднем, начиная со второй половины 1970-х годов ежегодный прирост продаж промышленных роботов составлял 30% [27]. Наибольшее распространение роботы получили в автомобильной промышленности, их использовали для сварки, покраски, сборки деталей и т. д.
Первым в мире конвейерную сборку механизмов ввел Петродворцовый часовой завод в 1965 году. До этого во всём мире механические часы от начала и до конца собирались вручную. Петродворцовый часовой завод первым же и отказался от конвейерной линии, заменив её промышленными роботами. Сборка часов проходила не по конвейерной, а по «постовой» схеме, которая обеспечивала большую производительность при меньшем проценте брака. За рационализацию производства Петродворцовый часовой завод был награждён Государственной премией (бывшая Сталинская премия). Автоматизация производства на этом предприятии высвободила на сборке часов 300 человек и увеличила производительность труда в 6 раз [12]. В 1980-е годы на заводе ежегодно производилось 4,5 экземпляров часов, а часы «Ракета» считались самыми лучшими в СССР. Роботы, разработанные на этом заводе, также использовались для сборки взрывателей и другой важной государственной деятельность [14].
Ролик 1977 года про автоматизацию производства на Петродворцовом часовом заводе
Ролик 1980-х годов про оборудование Петродворцового часового завода
Структура промышленного робота состоит из нескольких систем: исполнительной (двигательной), информационно-измерительной (сенсорной), управляющей (интеллектной) и системы связи (языка). Исполнительная система определяет способность робота совершать различные движения. В качестве исполнительных систем применяются механические манипуляторы, устройства передвижения, электромагнитные и пневматические манипулирующие устройства. Сенсорная система служит для восприятия и преобразования информации о состоянии внешней среды, результатах воздействия на неё исполнительной системы и о состоянии самого робота. Элементами сенсорной системы являются телевизионные и оптико-электронные устройства, лазерные и ультразвуковые дальномеры, контактные, индуктивные и тактильные датчики, разнообразные датчики положения и скорости и др.
Управляющая, или интеллектная, система выполняет следующие функции: на основе сигналов обратной связи от сенсорной системы она вырабатывает закон управления исполнительной системой; организует общение робота с человеком-оператором на заданном языке; планирует действия робота и принимает целенаправленные решения. Возможности робота главным образом зависят от программного и алгоритмического обеспечения его управляющей системы. Управляющие системы роботов создаются на базе ЭВМ или микропроцессоров. Система связи робота служит для обмена информацией между роботом, человеком-операторов, другими роботами и устройствами (в том числе технологическим оборудованием) с целью передачи заданий роботу, контроля за функционированием робота, диагностики неисправностей и т. п. Информация от человека поступает, как правило, через устройство ввода или пульт управления [17].
Одно из важнейших свойств промышленного робота – это перепрограммируемость. В роботах с цикловым программным управлением программируется последовательность выполнения движений от точки к точке. Цикловые роботы применяются для загрузочно-разгрузочных операций, транспортно-складских работ, а также в кузнечно-прессовом производстве, как промышленный робот «Циклон». Часто используются на сборочных операциях.
Позиционные промышленные роботы обладают более совершенной системой управления, но вместе с цикловыми роботами они уступают высокоэффективным промышленным роботам с контурным программным управлением на базе микропроцессоров. Последние применяются для автоматизации тяжёлых производственных процессов, таких как сварка, окраска, сборка и раскрой материалов. Пример такого механизма – робот «Бета» производственного объединения «ВАЗ» [18].
Предприятие «АвтоВАЗ» являлось передовым в Советском Союзе по внедрению роботов в автомобильную промышленность. Первые 10 штук роботов «Джулия» появились в 1978 году при запуске в производство автомобиля «Нива». Они имели гидравлический привод и использовались для сварки боковин и в прессовом производстве. В 1986 году при запуске в производство ВАЗ-2108, -2109, -21099 смонтировали 30 роботов «Бета» для точечной сварки [22]. После распада СССР завод по-прежнему использует роботы.
Учебный фильм 1986 г. про промышленные роботы в СССР
Расшифровку закадрового текста смотрите здесь
Космические роботы
В период Холодной войны среди крупнейших мировых держав развернулось соревнование в сфере космических технологий. Первый полёт в космос, первый выход человека в открытый космос, запуск искусственного спутника, высадка на Луну… Перед учёными стояли сложнейшие технологические задачи, которые они с блеском решали. Освоение космоса дало огромный толчок к созданию автоматических систем управления, а преимущества робота перед человеком для работы в космической среде были очевидны. На робота не влияют внешние неблагоприятные условия, такие как космическая радиация. Роботу не требуются дополнительные ресурсы, как правило, он работает на солнечных батареях. Робот идеально подходит для выполнения такой механической работы, как сбор грунта с поверхности, сканирование и отправка данных на Землю.
Первым в мире дистанционно-управляемым самоходным аппаратом стал Луноход-1, доставленный на поверхность Луны 17 ноября 1970 года советской межпланетной станцией «Луна-7». Этот аппарат весом 756 кг обладал двумя телекамерами, рентгеновским флуоресцентным спектрометром и рентгеновским телескопом, детектором радиации, лазерным рефлектором и антенной передачи информации на Землю. Каждое из восьми колёс имело свой тормоз и электродвигатель, благодаря чему луноход мог объезжать небольшие препятствия. Электричество вырабатывала солнечная батарея на крыше робота. Луноход-1 успел проехать более 10 км, передал на Землю 211 панорам и около 25 тысяч фотографий, после чего связь с Землёй оборвалась из-за выработки изотопного источника теплоты.

Луноход-1
Вслед за Луноходом-1 был создан Луноход-2. Его основными задачами являлись фото- и видеосъёмка поверхности Луны, проведение экспериментов с наземным лазерным дальномером и другие операции. Его доставили на Луну 15 января 1973 года. От первого аппарата Луноход-2 отличался наличием третьей телекамеры, что позволило увеличить дальность видимости. Он проработал почти 5 месяцев, прошёл за это время 37 км и передал на Землю 86 панорам и около 80 тысяч кадров. Луноход-2 вышел из строя из-за перегрева аппаратуры [21].
Тенденции развития отечественной робототехники
С распадом СССР плановая работа по развитию робототехники на государственном уровне остановилась, а серийное производство роботов практически прекратилось. Исчезли даже те роботы, что уже применялись в производстве. Так, Петродворцовый часовой завод был полностью разорён, а уникальное дорогое оборудование уничтожено или продано на металлолом. Всего в Советском Союзе было разработано свыше 200 моделей роботов [20].
В настоящее время безусловным лидером по производству роботов является Япония. В 2004 году количество промышленных роботов в этой стране достигало 350 тысяч штук, в то время как в России – всего 5 тысяч. К сожалению, пока разработка роботов не является важной государственной задачей, а частный бизнес предпочитает использовать импортных роботов. Предприятие, которое наиболее полно использует в своей работе достижения робототехники – это «Автоваз», в состав которого входит "Производство технологического оборудования и оснастки" (ПТОО). Основной задачей этого Производства является проектирование и изготовление промышленных роботов, роботизированных технологических комплексов и т. п. Всего за время работы на ПТОО было произведено более полутора тысяч различных роботов [13].
Основное применение роботизированные комплексы находят на автомобилестроительных предприятиях – Автоваз, ТагАз, ЗИЛ, ГАЗ, ИжАвто и другие. Одним из крупнейших поставщиков промышленных роботов в России является скандинавский концерн АББ [23]. После кризиса 1990-х годов отечественная робототехника до сих пор находится в упадке, и темпы её роста значительно отстают от зарубежных.
К сожалению, в России разработка роботов чаще ведётся благодаря энтузиазму изобретателей. Зачастую отечественные боевые и космические роботы по параметрам превосходят американские, но для постановки их на серийное производство нет средств. Так, военный робот «МРК-27 - БТ» манёвреннее, чем его зарубежные аналоги. Он управляется дистанционно при помощи джойстиков, а камеры помогают вести прицельный огонь. Пока этот робот существует в единственном экземпляре.
Специалисты Инженерного центра пожарной робототехники в Петрозаводске создали пожарного робота. Он предназначен для отражения пиратских атак на судна и оснащён мощным водомётом, способным смыть весь экипаж пиратского катера. Охранно-пожарные роботы ведут круглосуточное видеонаблюдение, ими заинтересовалось Мурманское пароходство [13].
Одним из современных направлений развития является экстремальная робототехника, которая используется для операций МЧС, МВД, оказания скорой помощи и других экстренных ситуаций (например, робот «Антитеррорист»).
Самая последняя тенденция в робототехнике – создание антропоморфных систем, или человекоподобных двуногих шагающих роботов (ДШР). Они предназначены для замещения человека во многих опасных видах деятельности, способны работать со всеми видами инструментов и устройств. Самый первый такой робот представила широкой публике в 1996 году фирма HONDA. Автономный робот модели Р2 мог свободно передвигаться, подниматься и спускаться по лестницам, совершать простые операции сборки.
В России разработкой антропоморфных роботов занимаются МГУ им. Ломоносова, МГТУ им. Баумана, НПО «Андроидная техника». Из последних разработок стоит отметить антропоморфного робота-космонавта SAR-400, которого создали в НПО «Андроидная техника» по заказу Роскосмоса. Проведение космических эксперимента с участием SAR-400 планируется в 2014 году [25]. Основное отличие российской модели от зарубежных разработок заключается в том, что робот способен передавать человеку-оператору вместе со звуком и картинкой весь спектр ощущений, включая тактильные [26].

SAR-400
Также специалисты говорят о том, что в России существует тенденция «старения общества», которая в скором времени может привести к снижению количества рабочих в промышленности. Поэтому так важны модернизация и автоматизация производства. Требуется пристальное внимание государства к этой проблеме, ведь если в ближайшие 10-15 лет Россия не увеличит темпы развития робототехники, она может навсегда отстать от мировых производителей.
В 2005 году была организована некоммерческая структура «Ассоциация разработчиков и изготовителей промышленной робототехники», в которые вошли 14 организаций, занимающихся промышленной робототехникой и научно-исследовательскими работами в этой области. Среди этих предприятий ЗАО «МНТК РОБОТ», ИМПех РАН, ЗАО «МНПО Спектр», ОАО «Станкоагрегат» и другие. Эта ассоциация планирует реанимировать российскую робототехническую промышленность [15].
Источники
1. История и современность робототехники. Средние века
2. Наталья Федосова. Вадим Мацкевич – победитель Америки
3. История робототехники: 1940-е годы
4. История робототехники: 1950-е годы
5. История робототехники: 1960-е годы
6. ЦНИИ робототехники и технической кибернетики
7. История института
8. Исследования по использованию нейроноподобных сетей
9. История робототехники: 1970-е годы
10. История робототехники: 1980-е годы
11. О промышленных роботах
12. Автоматизация производства
13. Рудаков Г. В. Анализ робототехники в России
14. Петродворцовый часовой завод
15. Степанов В.П., Платонов А.К. Шаг на пути возрождения робототехники в России
16. А. С. Климчук, Р.И. Гомолицкий и др. Разработка управляющих программ промышленных роботов
17. Веселков Р.С. Детали и механизмы роботов: Основы расчета, конструирования и технологии производства
18. Промышленные роботы в СССР. 1986 год
19. Страковская М.В. Робототехника как способ модернизации автомобильной промышленности
20. Отечественное роботостроение и новые «профессии» роботов
21. Роботы для освоения космоса
22. История внедрения роботов для контактной сварки на ОАО «Автоваз»
23. Открытие центра Робототехники в России
24. Hero (robot)
25. Кулаков, Б. Б., Беляев, В. В. Антропоморфные роботы как новая сфера применения гидроприводов
26. SAR-400
27. Wallen, J. The history of the industrial robot
28. ЧАЭС: Робот и робототехника на ликвидации аварии
Просмотров: 63017
statehistory.ru в ЖЖ:






